
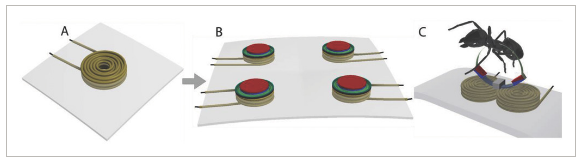
Van tast- of tactile displays tot medische robots: er ligt een breed terrein open voor het gebruik van zogenaamde buigzame of 'soft' robots, denk bijvoorbeeld aan het vasthouden van een levend insect in een 'grijpertje' dat het diertje niet moet pletten. Alleen hoe fabriceer je dergelijke actuatoren én hou je het betaalbaar?
Onderzoekers van UC Santa Barbara in Californië hebben een manier ontwikkeld om micro-actuatoren te bouwen die kunnen buigen, vervormen, rekken, draaien en samendrukken op manieren die normale, onbuigzame robots niet kunnen. Normale robots zijn vaak niet heel bruikbaar bij directe interactie met mensen of omgevingen die geen vaststaande structuur hebben, zoals de meeste biologische vormen.
Flexibele materialen
Om de actuatoren flexibel te maken, moesten de onderzoekers een manier verzinnen om elektromagnetische overbrenging samen te voegen met flexibele materialen om zowel snelheid als buigzaamheid te bereiken, denk aan een snelle spiercontractie bij mensen.
Een van de belangrijkste uitdagingen voor de onderzoeksgroep was het maken van een actuator die sneller kon werken dan bestaande buigzame actuatoren. De meeste actuatoren in dit genre werken door middel van langzame processen, zoals luchtstromen of thermische effecten.
Deze actuator functioneert met een laag voltage en is in feite gebaseerd op een elektromagnetische motor. Daardoor is de actuator snel, opgebouwd rond een elektromagnetische spoel. De spoelen zijn opgebouwd uit elastische vezels van een metallische legering die omhuld wordt door holle vezels van een polymeer, gecombineerd met gemagnetiseerde composieten. Daarmee hebben de onderzoekers een soort flexibele versie van een elektromotor gebouwd.
Toepassingen zijn legio: van gebruik bij medische ingrepen tot virtual- of augmented reality. De huidige vormen van fysieke actuatoren bij virtual reality en augmented reality of gewoon gebruik naast een normaal beeldscherm, zijn vaak nog knullig en te grof voor een verfijnd gevoel. Met betere tactiele feedback kan ook een combinatie met een telefoon of andere smart device worden afgestemd door bijvoorbeeld verwerking in kleding of andere accessoires.
Flexibele, en daardoor veelal minder onveilige, robots in productieomgevingen zijn ook nodig, zeker als interactie met personen gewenst is. Te zijner tijd zullen ook andere sensoren in dergelijke micro-robots geïntegreerd moeten worden om te zorgen voor volledig veilige interacties.




